
F450 Assembly & Calibration Quick Start Book
-

Part 1 Overview

-
Cautions:
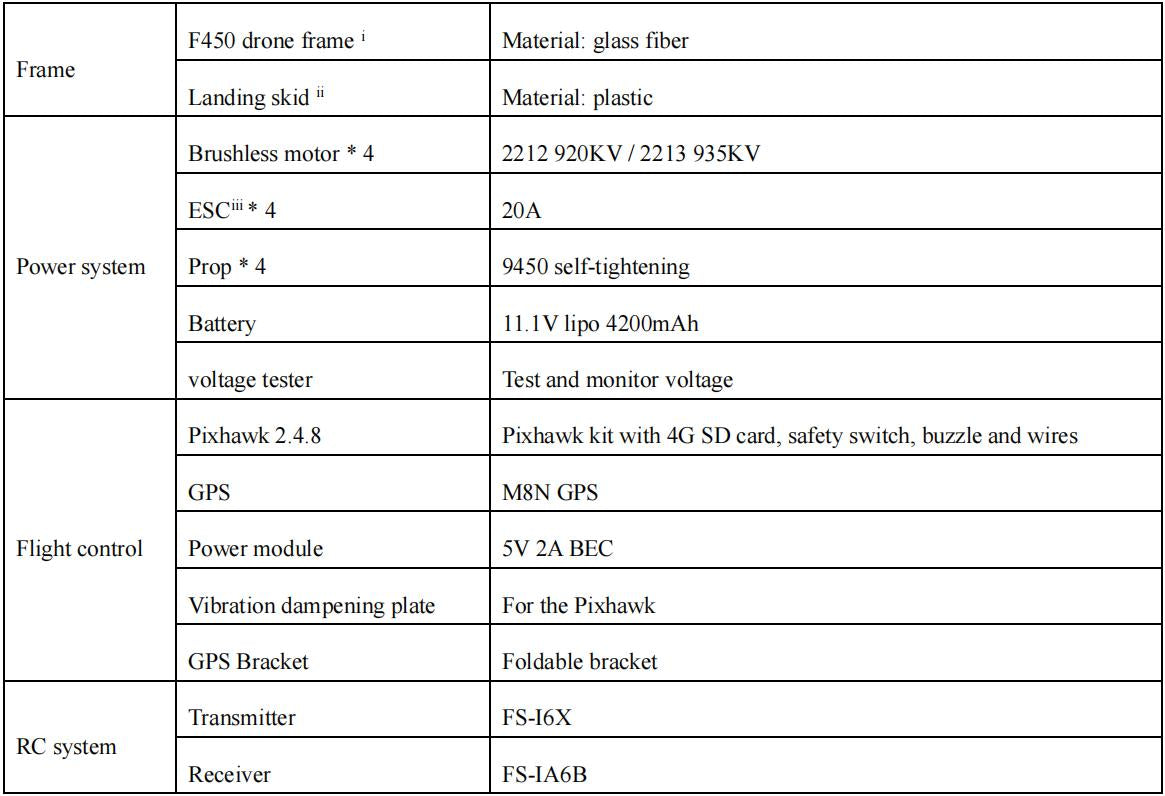
Based on your order, different kits contain different parts.




-

NOTE:
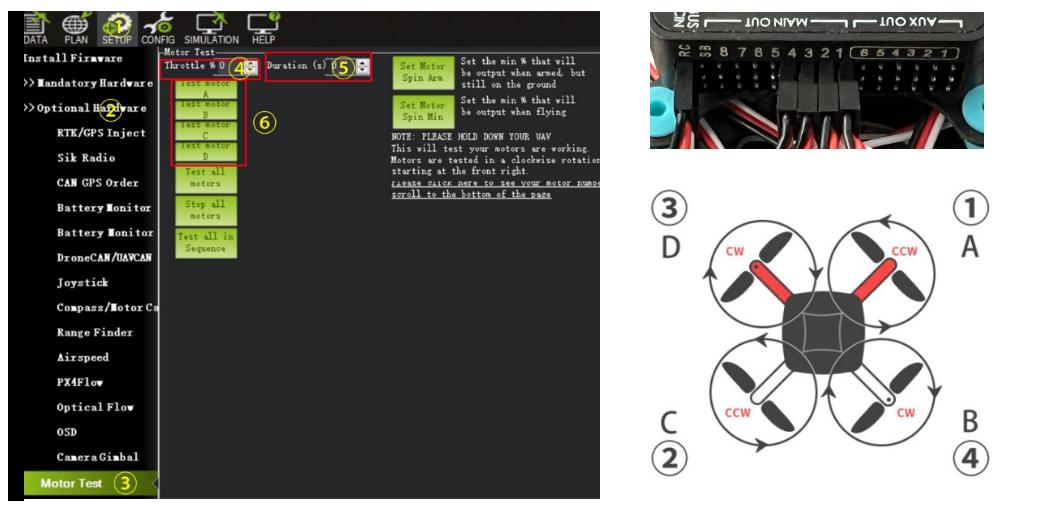
In 4.4 we will perform motor test; We need to check motors rotate direction at that time.
-

-
-











-

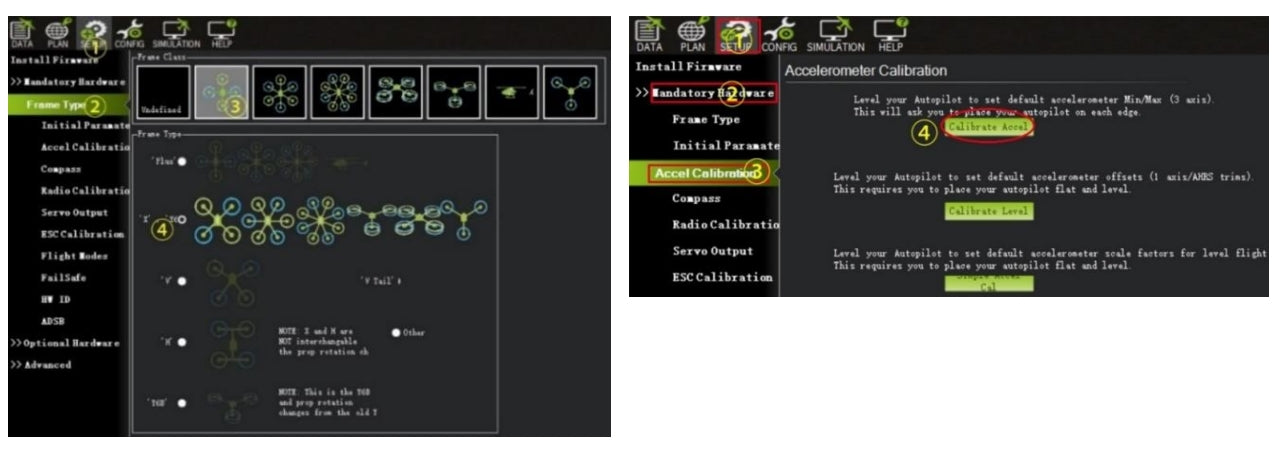
3. Use Mission Planner to connect and calibrate
Note: There are instructions of each step in Mission Planner, and please refer to videos if you need detailed operating guide.
a. Select frame type b. Calibrate accel

-
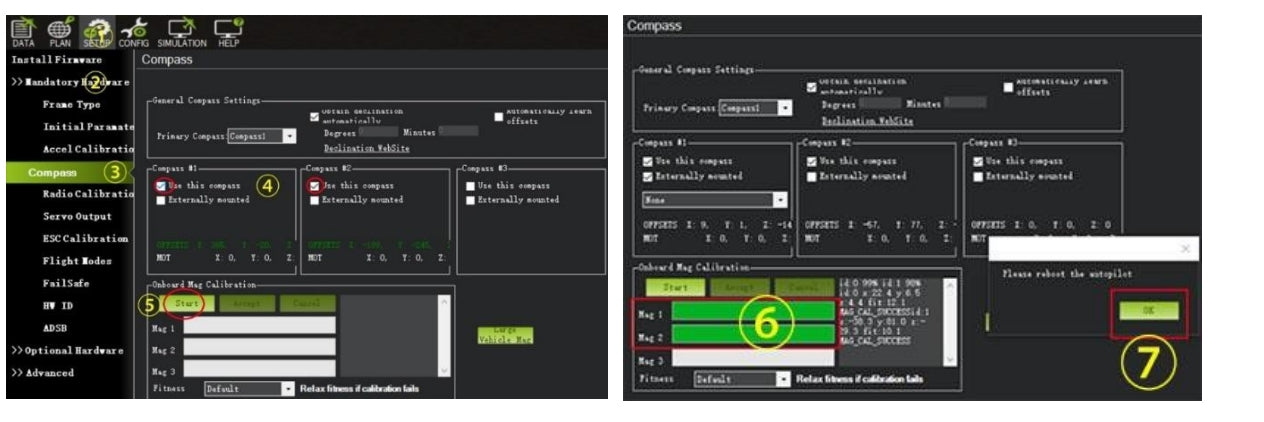
c. Calibrate compass
-
-

-

f. Set fail safe g. Set CH 7 RTL
-
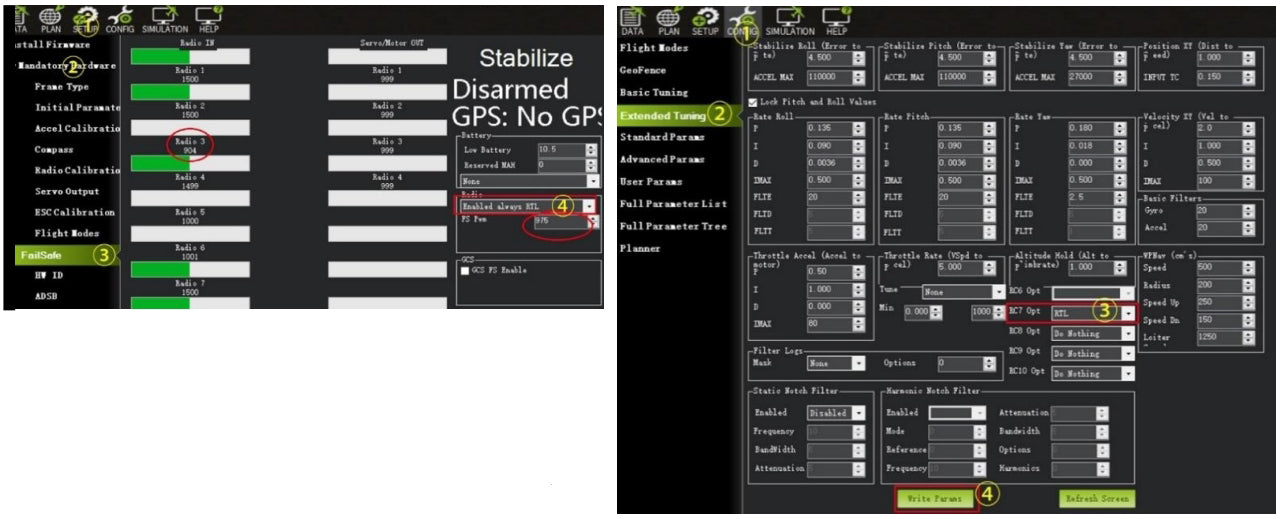
Note.
Turn off transmitter to check if radio 3 value<975. It means RTL will start when signal lost. -










-

Caution:
Rotating propellers can cause injury, be sure to keep them away from anyone and anything.
-

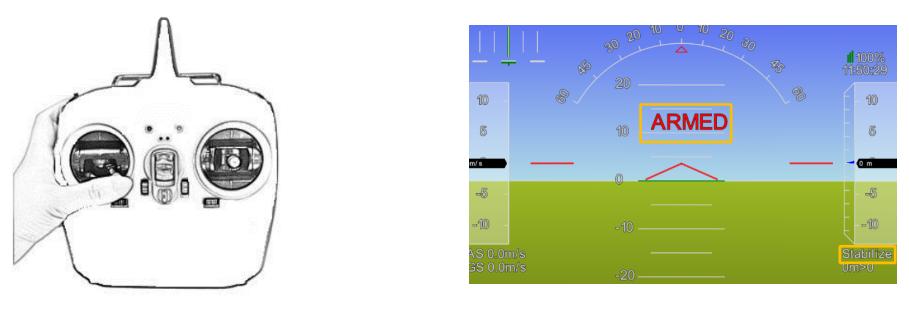
5. Switch flight modes
Use channel 5 switch to choose flight mode. We recommend newcomers use Loiter Mode, as it will help you complete a smoother flight with both GPS and barometer engaged.


-
7. Land
Use joystick to drive it to land or initiate RTL via CH7 switch.
RTL can only be used when its position is accurately located in open areas.
Note: Make sure there’s no obstacle between its current position and HOME position when use RTL.

-

9. Turn off the transmitter
